OneRec: Unifying Retrieve and Rank with Generative Recommender and Preference Alignment
Content
研究背景
- 请了解 QARM.
- $\mathcal{H}_u = \{v_1^h, v_2^h, \ldots, v_n^h\}$, user historical behavior sequence, 在快手的场景下, $v$ 表示一个视频.
- $\mathcal{S} = \{v_1, v_2, \ldots, v_m\}$, 推荐的一串视频流.
- session watch time (swt), view probability (vtr), follow probability (wtr), like probability (ltr).
核心思想
-
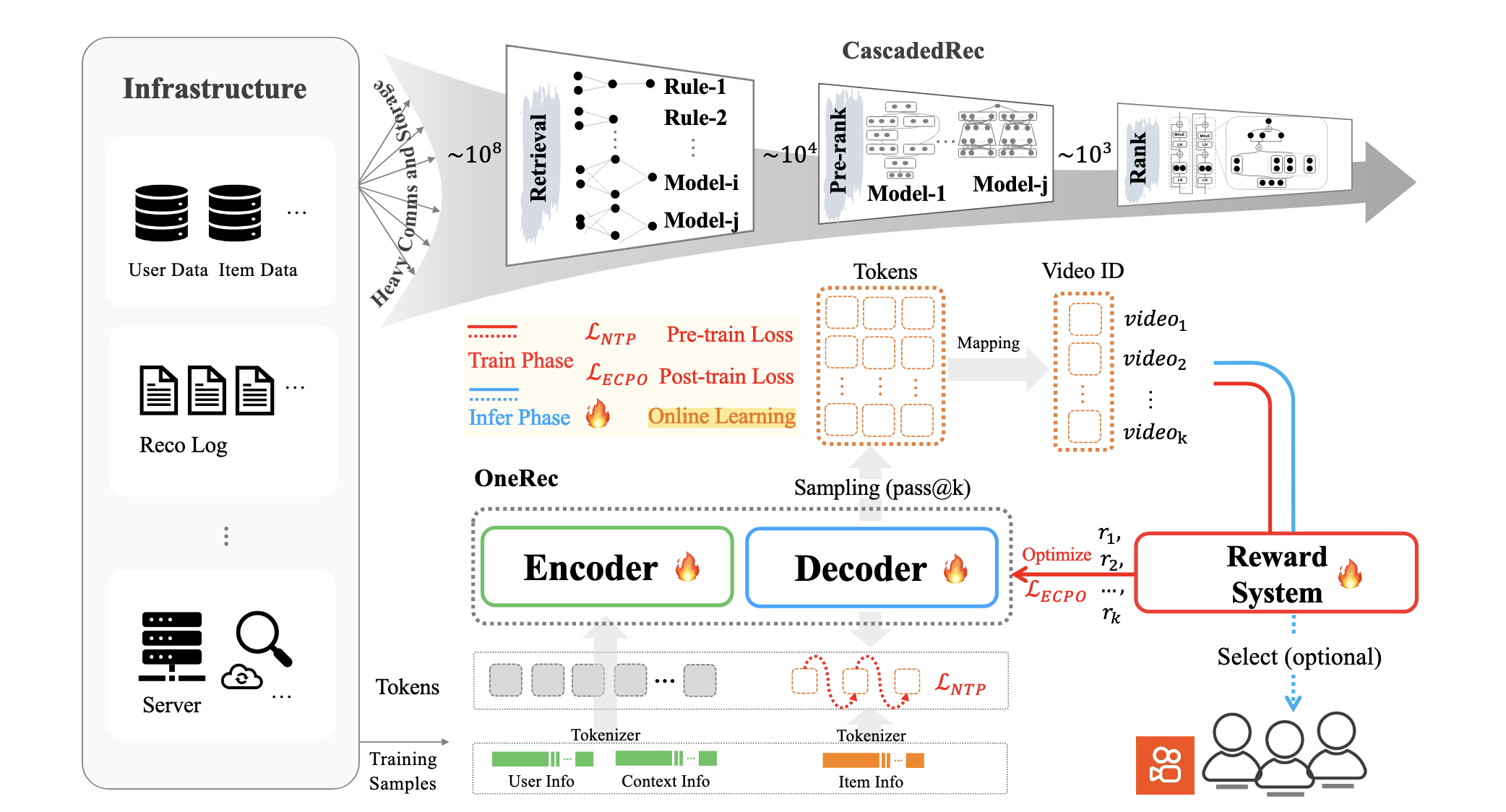
OneRec 的团队认为, 在大数据大模型大算力的当下, 推荐系统的发展可能仅仅就蹭到了大数据, 而大模型和大算力的进展一直不太让人满意. 他们认为最最主要的因素就是推荐系统"引以为傲"的 “粗排-精排” 体系. 这一套系统严重依赖特征工程和算法设计, 从而导致 算力的利用率低下 (既然整套系统都是零零碎碎的).
-
随着生成式推荐的发展, 各大公司都展开一系列研究, OneRec 给出了适合视频推荐的一套方案.
-
OneRec 的基本流程如下:
-
User: 将用户的静态/动态特征初步融合后, 通过 Encoder 得到其编码表示.
-
Item:
-
通过 Decoder 生成视频流, query 是视频流, key/value 是通过 Encoder 得到的 user 编码 (因此 OneRec 从架构上来说是类似 T5 的).
-
完成上述的预训练之后, 再利用 DPO 和一些特殊设计的 reward model 进行对齐训练, 这部分主要是为了使得预测结果和线上的一些指标 (swt, vtr, wtr, ltr) 进行对齐.
-
在预测的时候, 通过 beam search 筛选出视频流.
-
User Features: Multi-Scale Feature Engineering
-
OneRec 通过一个 Encoder 来提取 user 的编码, 作为后续 Decoder 的 Key/Value. 特别地, OneRec 对 Encoder 的输入, 即用户的特征做了特别的设计.
-
User static pathway: 将用户的静态特征, 包括 user identifier, age, gender 等信息进行编码:
$$ [\mathbf{e}_{uid}; \mathbf{e}_{age}; \mathbf{e}_{gender}; \cdots] \xrightarrow{ \text{Dense(LeakyReLU(Dense()))} } \mathbf{h}_u \in \mathbb{R}^{1 \times d_{model}}. $$ -
Short-term pathway: 挑选用户最近交互的 ($L_s=20$) 个视频的 <video identifier, author identifier, tag, timestamp, playtime, duration, labels> 等信息进行融合:
$$ [\mathbf{e}_{vid}^s; \mathbf{e}_{aid}^s; \mathbf{e}_{tag}^s; \mathbf{e}_{ts}^s; \mathbf{e}_{playtime}^s; \mathbf{e}_{dur}^s; \mathbf{e}_{label}^s] \xrightarrow{ \text{Dense(LeakyReLU(Dense()))} } \mathbf{h}_s \in \mathbb{R}^{L_s \times d_{model}}. $$ -
Positive-feedback pathway: 将用户给与最多正反馈的 ($L_p=200$) 个视频的 <video identifier, author identifier, tag, timestamp, playtime, duration, labels> 等信息进行融合:
$$ [\mathbf{e}_{vid}^p; \mathbf{e}_{aid}^p; \mathbf{e}_{tag}^p; \mathbf{e}_{ts}^p; \mathbf{e}_{playtime}^p; \mathbf{e}_{dur}^p; \mathbf{e}_{label}^p] \xrightarrow{ \text{Dense(LeakyReLU(Dense()))} } \mathbf{h}_p \in \mathbb{R}^{L_p \times d_{model}}. $$ -
Lifelong pathway: 为了从用户最多能到 100,000 个视频的交互中抽取出长期的兴趣偏好, OneRec 采用两阶段分层压缩:
-
对每个用户, 分别通过 K-means 对其交互序列聚类;
-
聚类完毕后, 聚类中心设定为该类中距离类别中心最近的 video;
-
该类别中心的离散特征 (如 vid, aid, label) 直接继承自 video 的离散特征, 其它连续特征取给类内的平均;
-
对用户的 $L_l = 2000$ 个历史交互进行信息融合:
$$ [\mathbf{e}_{vid}^l; \mathbf{e}_{aid}^l; \mathbf{e}_{tag}^l; \mathbf{e}_{ts}^l; \mathbf{e}_{playtime}^l; \mathbf{e}_{dur}^l; \mathbf{e}_{label}^l] \xrightarrow{ \text{Dense(LeakyReLU(Dense()))} } \mathbf{v}_l \in \mathbb{R}^{L_l \times d_{model}}. $$注意, 这里视频的特征都用其对应的类别中心的特征替换;
-
通过 QFormer 得到最终的 $\mathbf{h}_l \in \mathbb{R}^{N_q \times d_{model}}$, 这里 $N_q$ 一般取 128.
-
Item Features: Collaborative-Aware Multimodal Representation
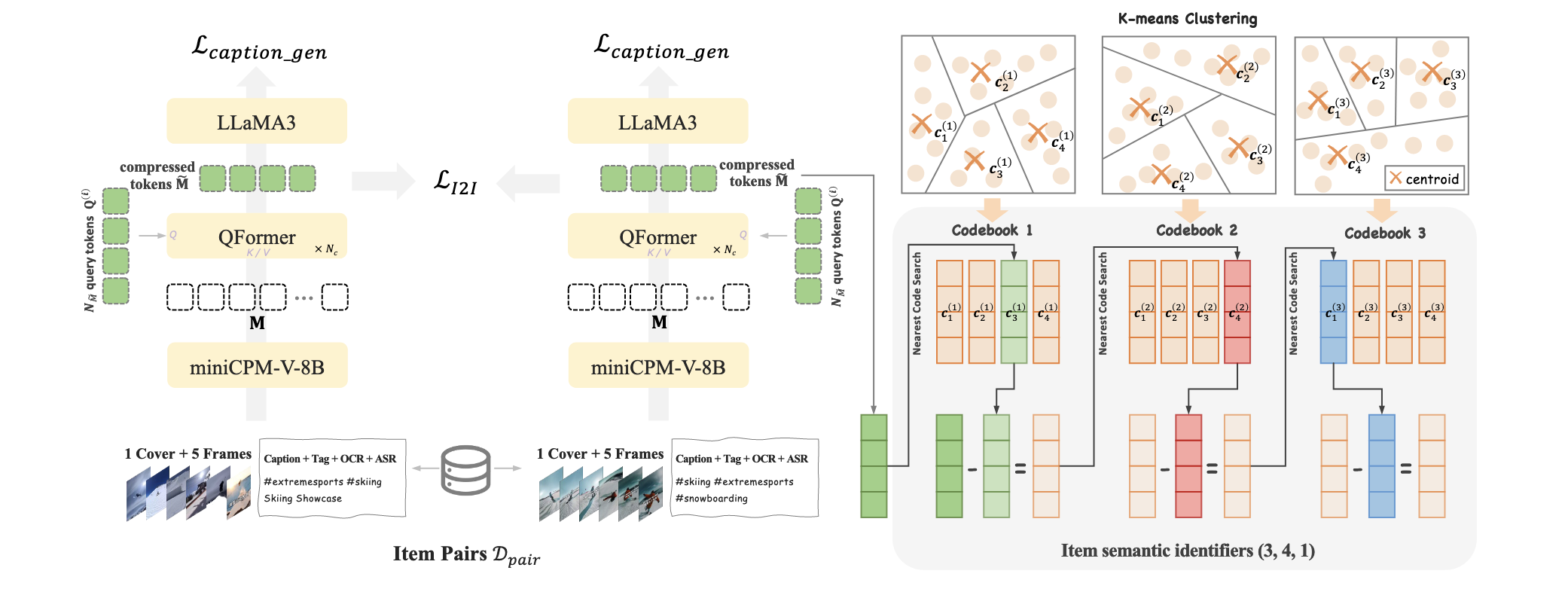
- Decoder 部分主要依赖的是 item 的离散编码, 而 item 离散编码则主要是根据一些特征通过 Residual-KMeans 得到的. 自然, Residual-KMeans 所依赖的 item features 起到了基石的作用. 这要求我们不能像 Tiger 这类最初的方法, 仅仅通过一些 freezed Encoder 模型来提取特征. 因此 OneRec 会添加如下的约束:
- 通过 miniCPM-V-8B 将多模态信息整合为 $\mathbf{M} \in \mathbb{R}^{N_M \times d_t}$ 大小的 token vectors (per item).
- 通过 QFormer 进一步融合得到 $\mathbf{\tilde{M}} \in \mathbb{R}^{N_{\tilde{M}} \times d_t}$, 通常 $N_{\tilde{M}} = 4$ (而 $N_M = 1280$).
- 通过 item-item 间的相似度构建高质量的 item-pair dataset $\mathcal{D}_{pair}$, 然后通过 item-item 间的对比学习来促使 item features 融合进这部分信息.
- 此外, 额外引入 Caption loss, 即通过 LLaMA3 来预测 Caption, 保证 features 不会丢失内容信息.
Balanced K-means Clustering
- 与 QARM 的 codebook 的确定方式的不同之处在于, 本文还强调每个类别的均分性.
Next-Token Prediction
-
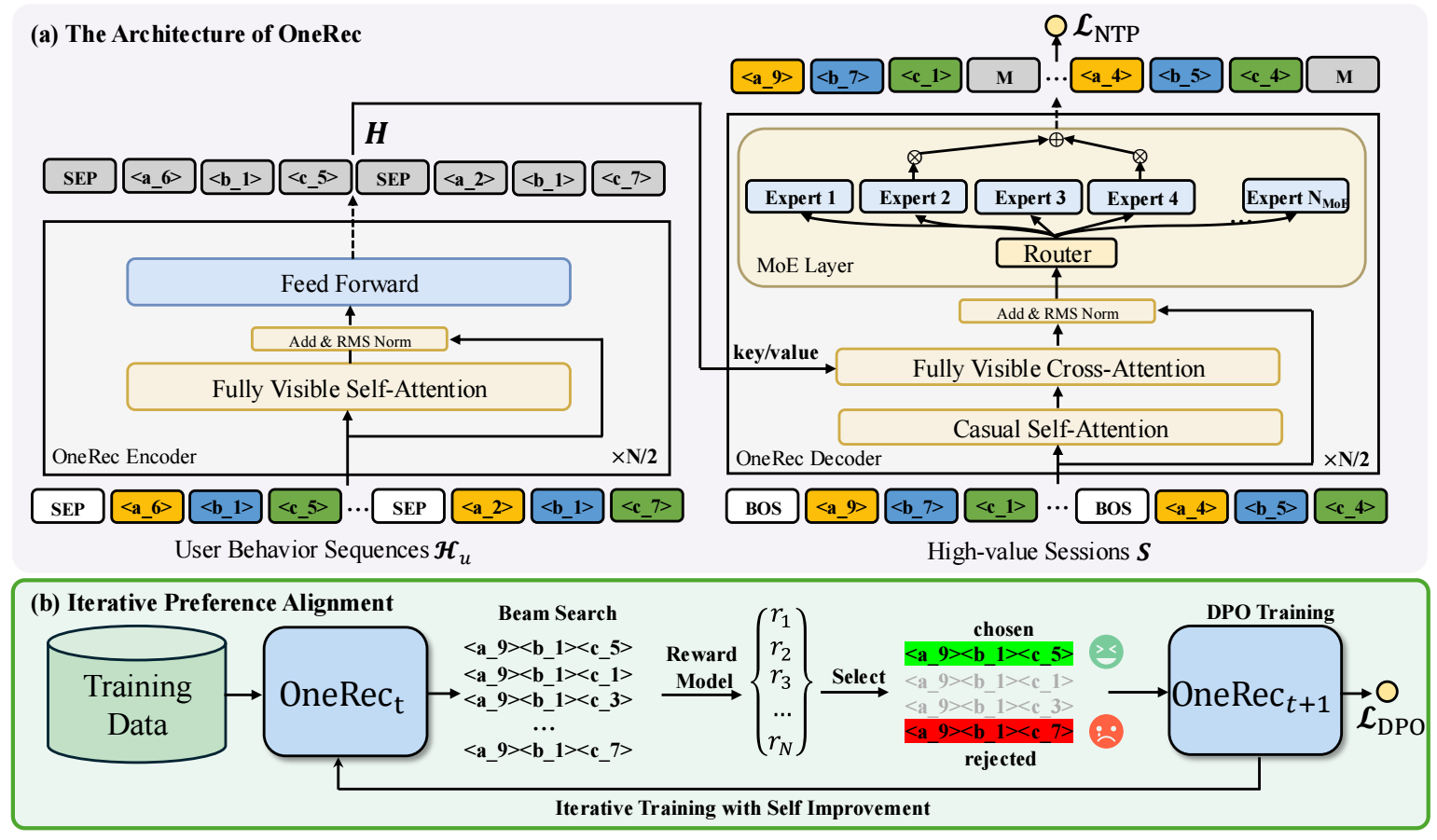
OneRec 的训练目标和一般的有不同之处, 首先, 需要在用户的交互记录中选择 high-quality sessions (文中并未提及是要同时满足还是满足任一即可, 我感觉后者会比较合理):
- 该 session 内用户所观看的视频数 $\ge 5$;
- 该 session 内用户累积观看时长 $\ge$ 某个阈值;
- 该用户对该 session 内的视频发生了如点赞, 收藏, 分享等行为.
-
于是, Decoder 的输入为:
$$ \mathcal{\bar{S}} = \{ \bm{s}_{\text{[BOS]}}, \mathbf{s}_1^1, \mathbf{s}_1^2, \cdots, \mathbf{s}_1^L, \bm{s}_{\text{[BOS]}}, \mathbf{s}_2^1, \mathbf{s}_2^2, \cdots, \mathbf{s}_2^L, \cdots, \bm{s}_{\text{[BOS]}}, \mathbf{s}_m^1, \mathbf{s}_m^2, \cdots, \mathbf{s}_m^L \}, $$其中 $\mathbf{s}_{\text{[BOS]}}$ 为不同视频的分隔符.
-
于是, OneRec 的主要损失为:
$$ \mathcal{L}_{\text{NTP}} = - \sum_{i=1}^m \sum_{j=1}^L \log P(\mathbf{s}_i^{j+1}| [ \bm{s}_{\text{[BOS]}}, \mathbf{s}_1^1, \mathbf{s}_1^2, \cdots, \mathbf{s}_1^L, \cdots, \bm{s}_{\text{[BOS]}}, \mathbf{s}_i^1, \cdots, \mathbf{s}_i^j ]; \Theta). $$
Iterative Preference Alignment with RM
-
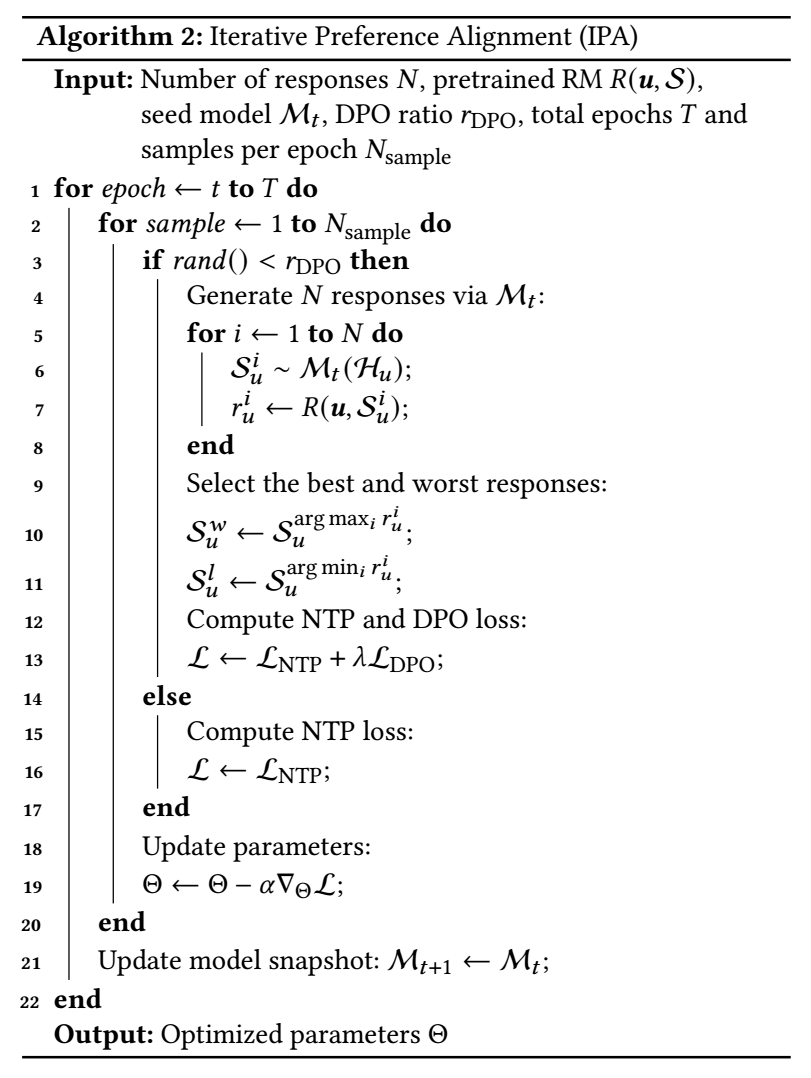
特别地, 本文还采用 Direct Preference Optimization (DPO) 来进行偏好对齐. 由于推荐场景数据反馈的稀疏性, OneRec 借助一个 reward model (RM) 首先拟合反馈, 然后再用于提升 OneRec.
-
对于 RM, 我们首先得到 user 的 target-aware 的表示 $\bm{h}_f \in \mathbb{R}^{m \times d}$ 序列, 然后分别计算不同的指标:
$$ \hat{r}^{swt} = \text{Tower}^{swt}(\text{Sum}(\mathbf{h}_f)), \\ \hat{r}^{vtr} = \text{Tower}^{vtr}(\text{Sum}(\mathbf{h}_f)), \\ \hat{r}^{wtr} = \text{Tower}^{wtr}(\text{Sum}(\mathbf{h}_f)), \\ \hat{r}^{ltr} = \text{Tower}^{ltr}(\text{Sum}(\mathbf{h}_f)), $$其中 $\text{Tower}(\cdot) = \text{Sigmoid}(\text{MLP}(\cdot))$. 然后通过 BCE 进行训练:
$$ \mathcal{L}_{\text{RM}} = -\sum_{xtr \in \{swt, vtr, wtr, ltr\}} \big( y^{xtr} \log (\hat{r}^{xtr}) + (1 - y^{xtr}) \log (1 - \hat{r}^{xtr}) \big). $$ -
接下来通过 RM 来迭代地提升 OneRec:
一些有趣的实验
Parameter Scaling
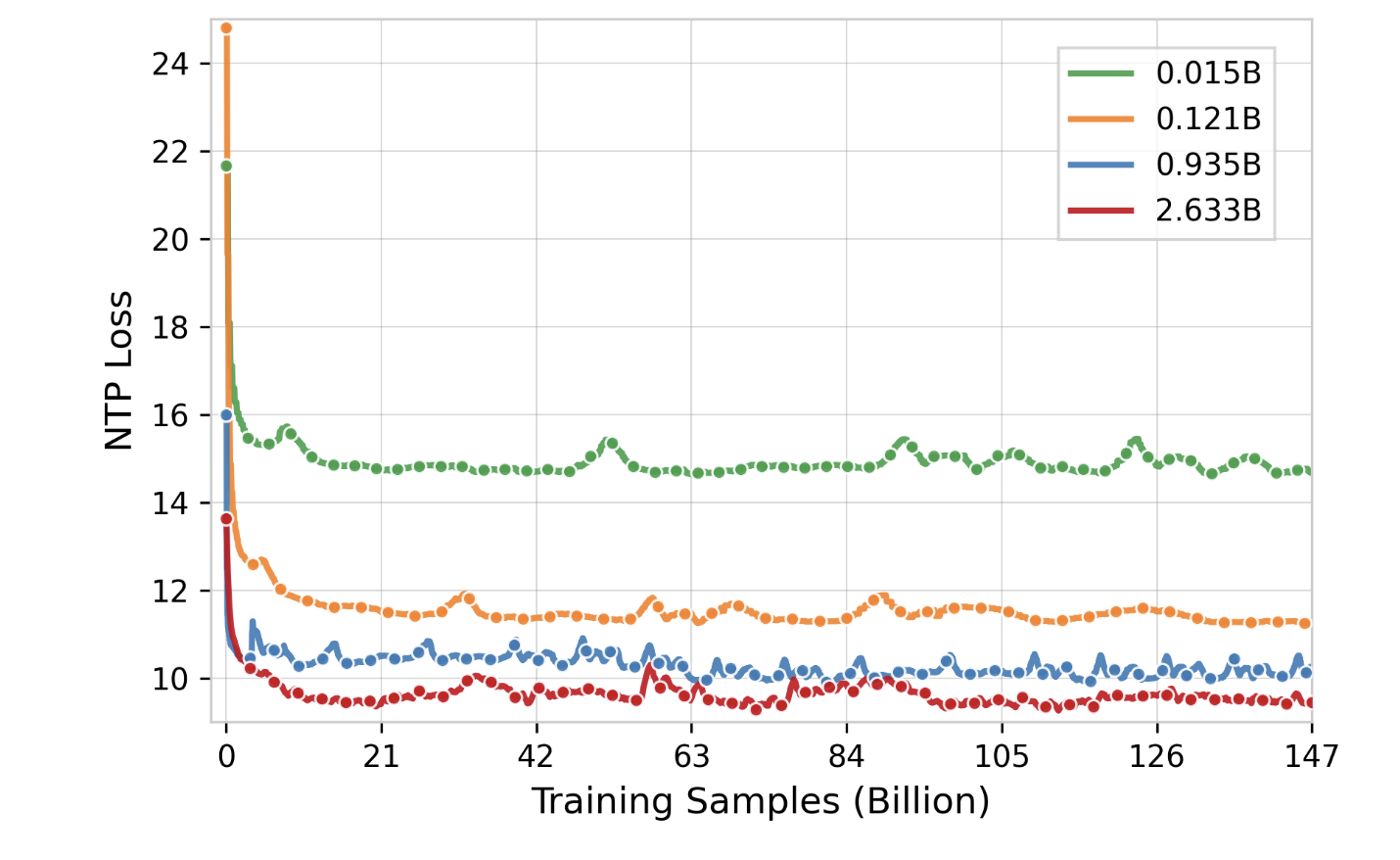
- 诚然, 随着 OneRec 参数量的增加, NTP Loss (即预训练阶段的 loss) 会有一个显著的下降, 但是这个下降并不依赖数据集的持续扩张. 实际上, 10B 的样本是一个临界点, 在这个临界点之前, 不同大小的 OneRec 都能够随着训练的进行快速收敛, 之后大家都进入了一个缓慢的收敛阶段.
Infer Scaling
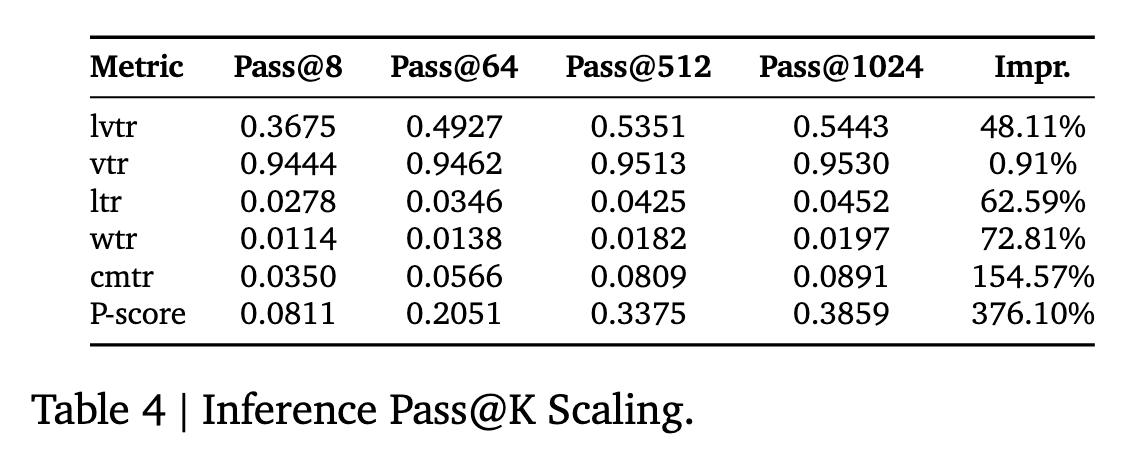
- 在推理阶段生成更多的候选 items 会极大有利于效果的提升 (尤其是是 Pass@$K=8\rightarrow 512$).
注: 如果我没理解错, $K$ 应该是指 beam search 的采样次数.
Sampling Efficiency
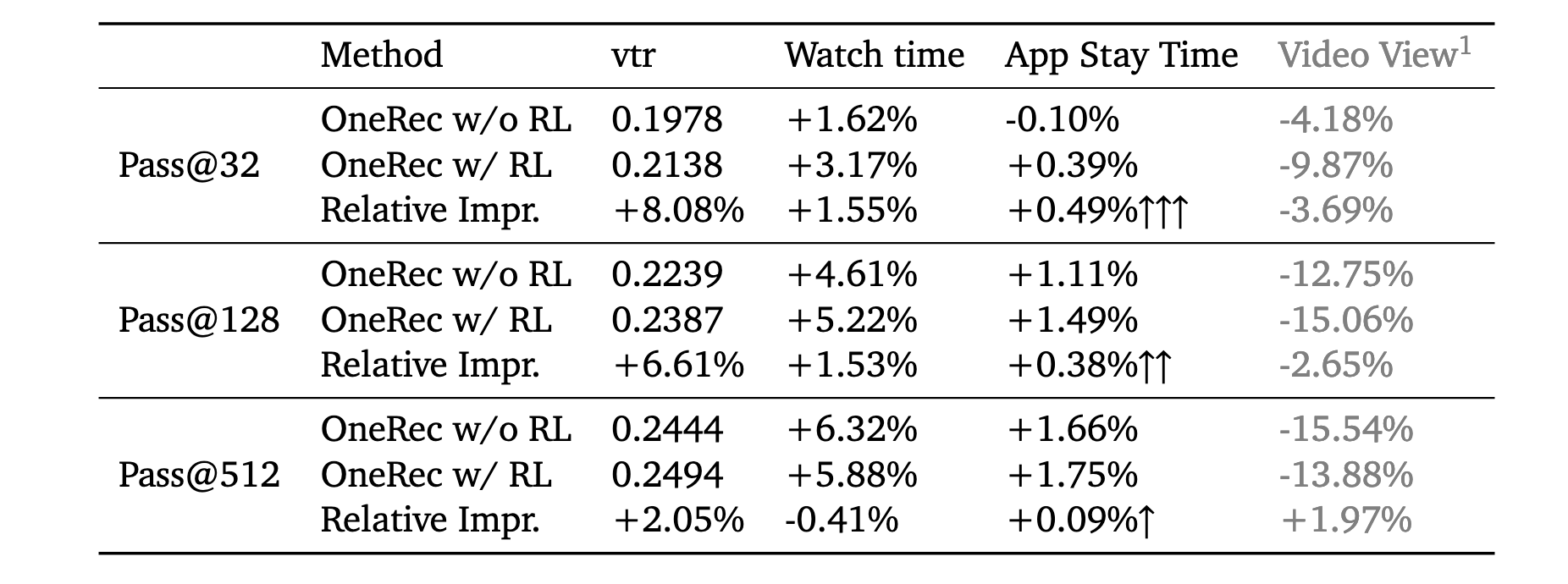
- 有很多文章生成, RL 的对齐过程其实并没有让模型学到什么新的知识, 只是让模型具备更强的输出高概率答案的能力. 上表似乎验证了这一点, 采样次数越少, RL 所带来的增益越大.