Restructuring Vector Quantization with The Rotation Trick
预备知识
- 需要对 VQ-VAE 有基本的了解.
核心思想
STE for VQ
向量量化是把输入 $\bm{x}$ 映射到 Codebook $\mathcal{C} = \{\bm{c}_1, \bm{c}_2, \ldots, \bm{c}_{|\mathcal{C}|}\}$ 的过程:
$$ \bm{x} \in \mathbb{R}^p \overset{\text{Encoder } \phi}{\longrightarrow} \bm{z} \in \mathbb{R}^d \overset{\text{VQ } \varphi}{\longrightarrow} \bm{q} = \varphi(\bm{z}) \in \mathcal{C}. $$然后 VQ-VAE 中训练 Encoder 以及 Codebook $\mathcal{C}$ 主要是通过重构, 即依赖一个 Decoder $\Phi$:
$$ \varphi(\bm{z}) \overset{\text{Decoder } \Phi}{\longrightarrow} \hat{\bm{x}} = \Phi(\bm{q}), $$然后通过重构损失去训练:
$$ \mathcal{L}_{rec} = \|\hat{\bm{x}} - \bm{x}\|_2^2. $$这在 $\varphi$ 是可微函数的时候容易做到, 然后一般情况下, Vector Quantization 的过程是不可微的:
$$ \bm{q} = \varphi(\bm{z}) = \text{argmin}_{\bm{c} \in \mathcal{C}} \|\bm{c} - \bm{z} \|. $$显然 $\text{argmin}$ 的操作是不可导的.
所以, 为了能够正确回传梯度, 通过采用 straight-through estimator (STE):
$$ \bm{q} \leftarrow \bm{z} + \text{sg}[\bm{q} - \bm{z}], $$这里 $\text{sg}$ 表示阻断梯度的操作, 此时
$$ \mathrm{d}\bm{q} = \mathrm{d}\bm{z} + \bm{0}. $$除此之外, VQ-VAE 还引入了 commit loss 来促进 $\bm{z}$ 和 $\bm{q}$ 的匹配, 这部分设计和本文的中心思想并无太大关系, 故不再赘诉.
STE 的问题
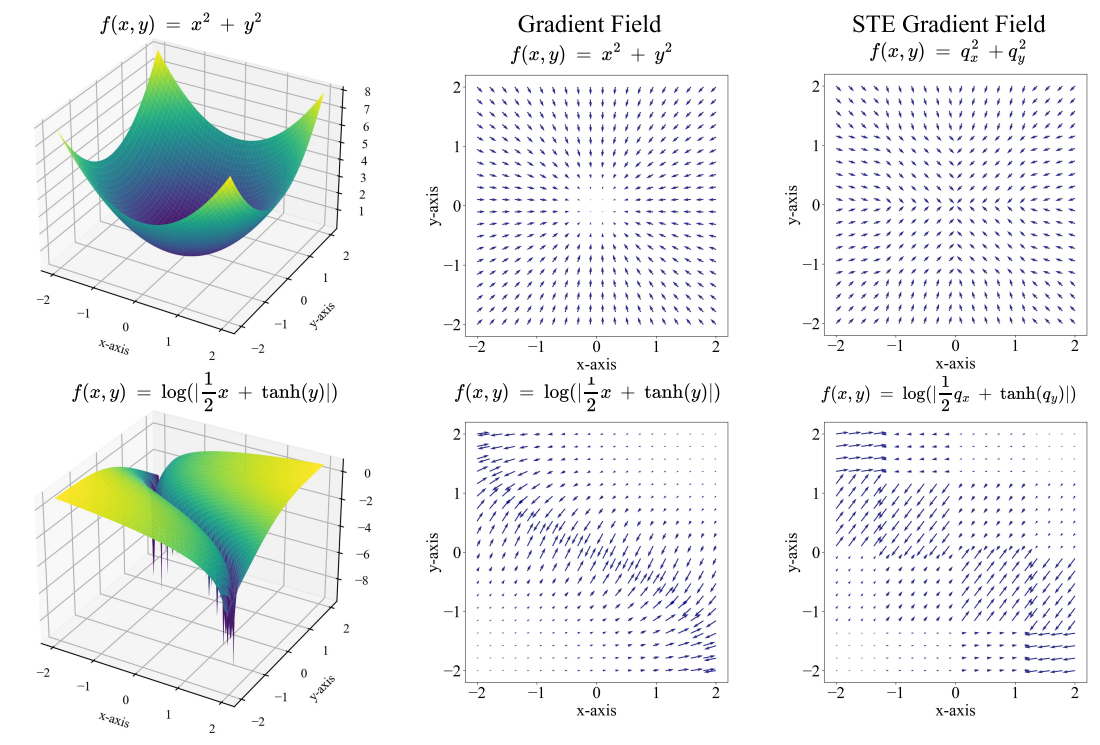
STE 的问题其实非常明显: 对于分配给相同 $\bm{c} \in \mathcal{C}$ 的任意隐向量 $\bm{z}$, 它们都会收到相同的梯度, 即
$$ \nabla_{\bm{z}} \mathcal{L} = \nabla_{\bm{q}} \mathcal{L}, \quad \forall \varphi(\bm{z}) = \bm{q}. $$如上图所示, 第一列是正常是函数值映射; 第二列是正常的梯度; 第三列则是由 STE 估计出来的梯度. STE 会呈现出明显的区块现象, 对于梯度方向以及大小的感知因而明显变差.
Rotation Trick
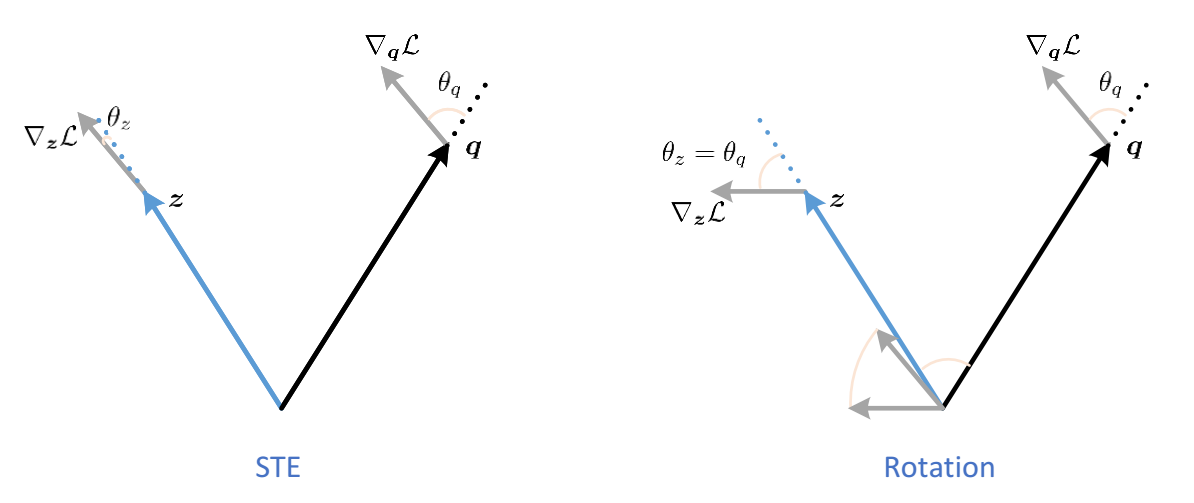
不同于 STE 直接 copy $\bm{q}$ 上的梯度, 本文所提出的 Rotation trick 希望:
$$ \angle (\bm{z}, \nabla_{\bm{z}} \mathcal{L}) =\angle (\bm{q}, \nabla_{\bm{q}} \mathcal{L}). $$只需要通过如下的技巧即可满足:
$$ \tag{1} \bm{q} \leftarrow \text{sg} \bigg[\frac{\|\bm{q}\|}{\|\bm{z}\|} R \bigg] \bm{z}, $$这里 $R \in \mathbb{R}^{d \times d}$ 是一个旋转矩阵, 它将 $\bm{z}$ 旋转至原本的 $\bm{q}$ 的方向.
此时, 对于梯度, 我们有:
$$ \nabla_{\bm{z}} \mathcal{L} = \frac{\|\bm{q}\|}{\|\bm{z}\|} R^T \nabla_{\bm{q}} \mathcal{L}. $$即 $\nabla_{\bm{z}} \mathcal{L}$ 是在 $\nabla_{\bm{q}} \mathcal{L}$ 逆向旋转 $\angle (\bm{z}, \bm{q})$ 角度得到的 (旋转矩阵满足 $R^T R = I$). 如上右图所示, 很容易想象 $\theta_z = \theta_q$. 稍稍严格一点, 我们有:
$$ \tag{2} \langle \bm{z}, \nabla_{\bm{z}} \mathcal{L} \rangle =\langle \bm{z}, \frac{\|\bm{q}\|}{\|\bm{z}\|} R^T \nabla_{\bm{q}} \mathcal{L} \rangle =\langle \frac{\|\bm{q}\|}{\|\bm{z}\|} R \bm{z}, \nabla_{\bm{q}} \mathcal{L} \rangle =\langle \bm{q}, \nabla_{\bm{q}} \mathcal{L} \rangle. $$
旋转矩阵 $R$ 的构造
在二维平面上, 构造 $R$ 似乎是容易的, 在高维空间, 需要利用到 Householder transformation: 给定一个向量 $\bm{v}$, 它对应的与 $\bm{v}$ 正交平面 (过原点) 记为 $\bm{v}^{\perp}$. 对于任意的向量 $\bm{u}$, 它关于 $\bm{v}^{\perp}$ 的反射为:
$$ \underbrace{(I - 2\frac{\bm{v}\bm{v}^T}{\|\bm{v}\|^2})}_{:= P} \bm{u}, $$其中 $P$ 为 Householder matrix.
注意, 假设 $\bm{u} = \bm{u}_1 + \bm{u}_2$, 其中 $\bm{u}_1 \in \bm{v}^{\perp}, \bm{u}_2 \perp \bm{v}^{\perp}$, 即为一个正交分解. 则它关于 $\bm{v}^{\perp}$ 的反射定义为:
$$ \bm{u}' = \bm{u}_1 - \bm{u}_2. $$此时, 我们容易证明:
$$ \begin{array}{ll} &(I - 2 \frac{\bm{v}\bm{v}^T}{\|\bm{v}\|^2}) \bm{u} =(I - 2 \frac{\bm{v}\bm{v}^T}{\|\bm{v}\|^2}) (\bm{u}_1 + \bm{u}_2) \\ =&(\bm{u}_1 + \bm{u}_2) - 2 \frac{\bm{v}^T \bm{u}_2}{\|v\|} \frac{\bm{v}}{\|v\|} =\bm{u}_1 + \bm{u}_2 - 2 \|\bm{u}_2\| \frac{\bm{v}}{\|v\|} \\ =&\bm{u}_1 + \bm{u}_2 - 2 \bm{u}_2 = \bm{u}_1 - \bm{u}_2. \end{array} $$两个向量 $\bm{a} \rightarrow \bm{b}$ 的旋转匹配可以通过两次反射得到:
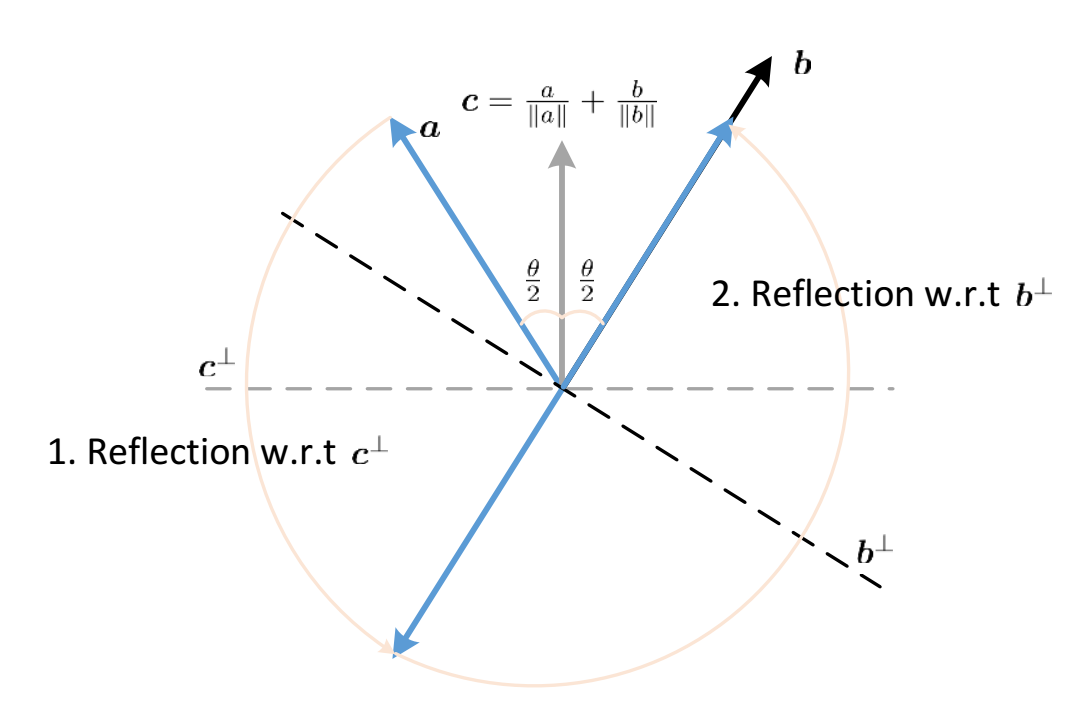
如上图所示:
定义 $\bm{c} = \frac{1}{2} (\frac{\bm{a}}{\|\bm{a}\|} + \frac{\bm{b}}{\|b\|})$;
将 $\bm{a}$ 根据 $\bm{c}$ 进行反射变换:
$$ \bm{a}' = \Big(I - 2\frac{\bm{c}\bm{c}^T}{\|\bm{c}\|^2} \Big) \bm{a}. $$不难发现, 此时 $\bm{a}'$ 和 $\bm{b}$ 已经关于 $\bm{b}^{\perp}$ 对称 (忽略长度的不一致) 了;
- $$ \bm{a}'' = \Big(I - 2\frac{\bm{b}\bm{b}^T}{\|\bm{b}\|^2} \Big) \bm{a}'. $$
总结就是, 将 $\bm{z}$ 旋转至 $\bm{q}$ 方向上只需要通过旋转矩阵
$$ \tag{3} R := \Big(I - 2 \frac{\bm{q}\bm{q}^T}{\|\bm{q}\|^2}\Big) \Big(I - 2 \frac{\bm{r}\bm{r}^T}{\|\bm{r}\|^2}\Big), \quad \bm{r} := \frac{\bm{q}}{\|\bm{q}\|} + \frac{\bm{z}}{\|\bm{z}\|}. $$
Reflection Trick
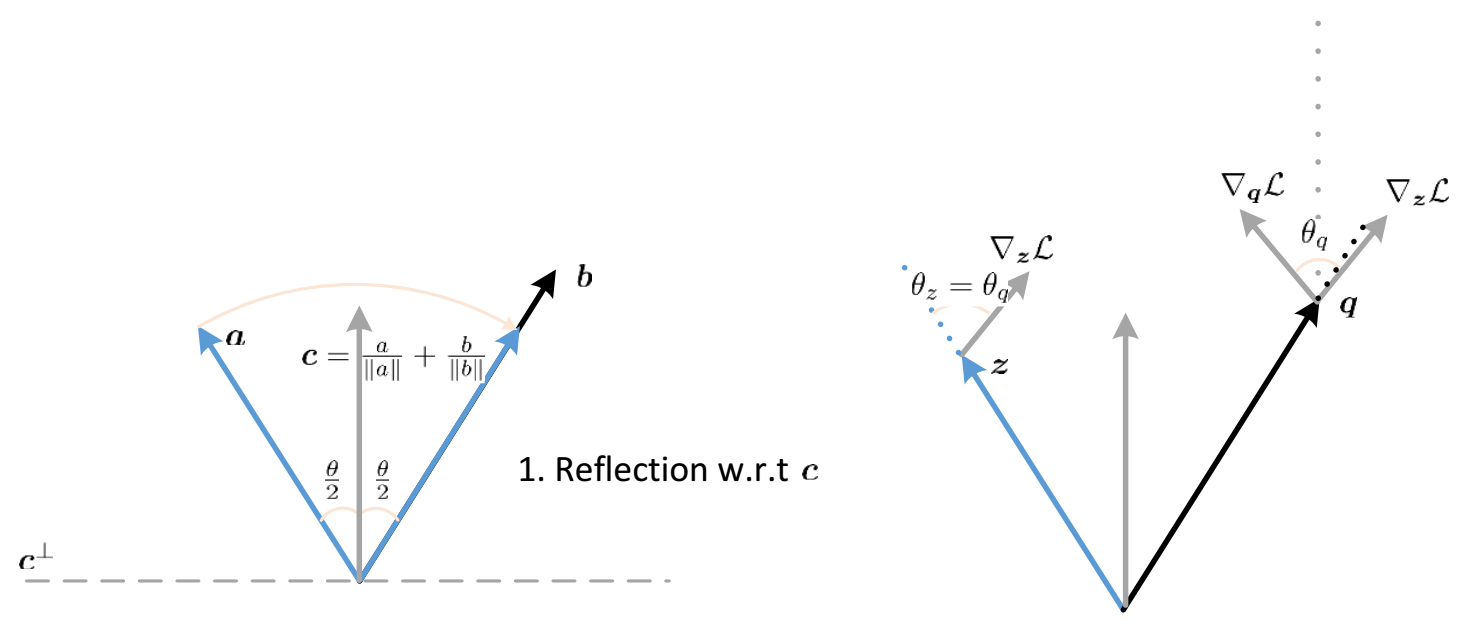
如上图所示, 想要满足 $\angle (\bm{z}, \nabla_{\bm{z}} \mathcal{L}) = \angle( \bm{q}, \nabla_{\bm{q}} \mathcal{L})$, 旋转矩阵并非唯一的路径, 实际上细心的读者容易发现, 我们压根不需要进行两次 reflection. 只需要以 $\bm{c}$ (所代表的) 对称轴进行反射就可以直接实现 $\bm{a}, \bm{b}$ 的对齐. 这个对称轴实际上是
$$ \bm{c}' = \frac{\bm{a}}{\|\bm{a}\|} - \frac{\bm{b}}{\|\bm{b}\|} $$所对应的平面 ${\bm{c}'}^{\perp}$. 因此, $\bm{z} \rightarrow \bm{p}$ 只需要:
$$ \tag{4} R = \Big(I - 2 \frac{\bm{r} \bm{r}^T}{\|\bm{r}\|^2}\Big), \quad \bm{r} := \frac{\bm{z}}{\|\bm{z}\|} - \frac{\bm{q}}{\|\bm{q}\|}. $$
STE vs. Rotation vs. Reflection
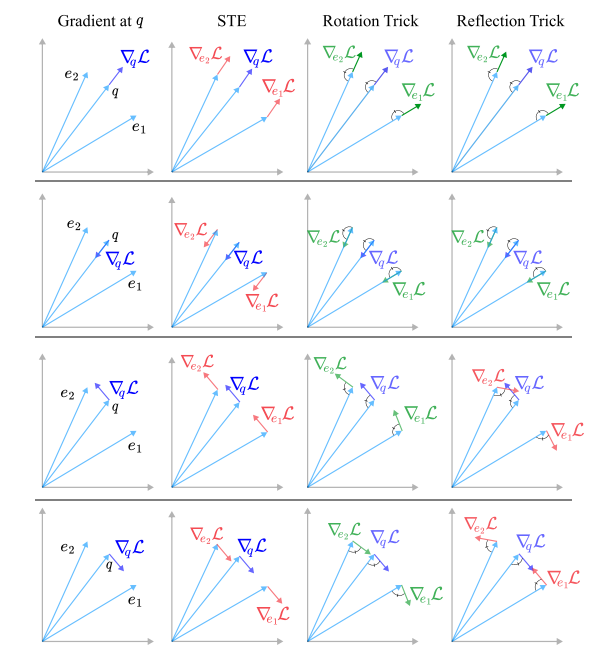
如上图所示:
- STE 就只是无脑的 copy;
- Rotation 给人的感觉是 $\bm{z}$ (就是图中的 $\bm{e}$) 的更新"旋转"方向和 $\bm{q}$ 一致;
- Reflection 的特点方向和梯度方向更新有关. 当 $\nabla_q \mathcal{L}$ 方向是使得 $\bm{q}$ 远离 (靠近) $\bm{z}$ 的时候, 由 reflection 所得到的 $\nabla_{\bm{z}} \mathcal{L}$ 的方向也是促使 $\bm{z}$ 远离 (靠近) $\bm{q}$ 的.
作者只是在附录中文字说了 Reflection 会导致更差的结果, 但是并没有给出具体的结果.
Scaling Term $\|\bm{q}\| / \|\bm{z}\|$
实际上如下的变换都能满足我们想要的夹角一致性:
$$ \bm{q} \leftarrow \text{sg}[\gamma R] \bm{z} + \text{sg}[\bm{q} - \gamma R \bm{z}]. $$所得梯度关系为:
$$ \nabla_{\bm{z}} \mathcal{L} = \gamma R^T \nabla_{\bm{q}} \mathcal{L}. $$所以为什么需要恰好令 $r=\|\bm{q}\| / \|\bm{z}\|$. 作者讨论了一些极端情况, 认为这种 scaling 更具鲁棒性. 我个人感觉主要性质 (2), 它保证了内积的一致性, 那么沿着此方向更新, 产生的效果是一致的.